驱动器5X00594G01面板

混合励磁同步电机(hybrid excited synchronous machine, HESM)是一种宽调速电机,它结合了永磁同步电机和电励磁同步电机的优点,又克服了它们各自的缺点。因此,它在宽速度运行范围的风力发电系统和电驱动系统具有广阔的应用前景。 混合励磁同步电机的基本由于混合励磁电机在结构上实现了电机气隙磁场的直接调节与控制,突破了传统永磁电机通过电枢电流矢量控制实现弱磁或增磁的局限,结构上可有多种实现方式。 按照转子(动子)的运动方向可分为旋转式混合励磁电机和直线式混合励磁电机;从电机永磁体放置位置可分为转子永磁型混合励磁电机和定子永磁型混合励磁电机。
接口板模块
ABB机器人提供了丰富I/O通信接口,可以轻松的实现与周边设备进行通信表。
关于ABB机器人I/O通信接口的说明
1、ABB标准I/O板提供的常用信号处理有数字输入di、数字输出do、模
拟输入ai、模拟输出AO,以及输送链跟踪。
2、ABB机器人可以选配标准ABB的PLC ,省去了原来与外部PLC进行通
信设置的麻烦,并且在机器人的示教器上能实现与PLC相关的操作。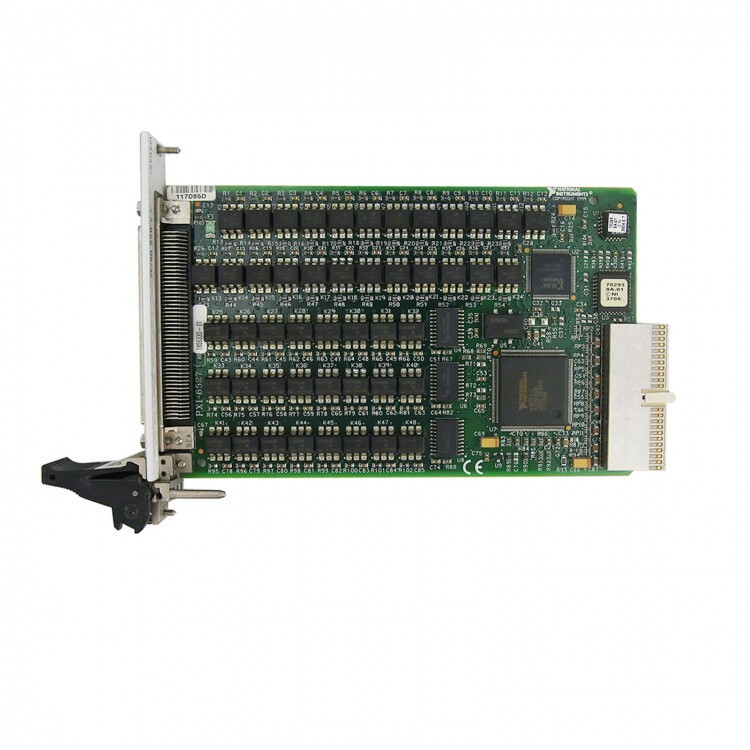
机器人系统中,我们继续开发 和灵活的解决方案,以帮助企业克服挑战,响应不断变化的客户需求,并在日益数字化的时代蓬勃发展,”ABB 机器人事业部总裁 Marc Segura 说。
“RobotStudio Cloud 等基于 Web 的新工具为制造商规划和设计机器人自动化解决方案的方式带来了新的敏捷性和灵活性。RobotStudio Cloud 提供简化的用户体验,有助于 协作并降低复杂性,使新手和 都能突破机器人编程的界限。”
微型电机和微型电机只有与匹配的运动控制器结合使用才能成为可靠的驱动系统。这就是为什么驱动 ABB(见公司框)提供的 电机系列包括多种运动控制器选择,这些运动控制器设计为不同功率等级,带或不带外壳,适用于各种应用。现在,无外壳运动控制器系列又添新成员:MC3603(图 1),由于其紧凑的尺寸,非常适合集成到设备制造和医疗技术应用中 运动控制器具有 36 V 和 3 A(峰值电流 9 A),覆盖中等功率范围,可达约。100 W。适用于带编码器的“普通”直流电机、无刷驱动器和直线电机。I/O 选项和编码器接口与该产品系列的其他产品相同。USB、RS232、CANopen 和 EtherCAT 可用于通信。运动控制器已经有了新的固件版本“M”。为确保简单方便的系统设置,应使用 FAULHABER 运动管理器的 新更新(6.9 版)。
适用于所有运动控制器的 EMC 兼容设计
模块一次添加一个到配置中选择参数以应用于模块的所有通道。可以选择逻辑模块来提供HART状态和过程Profibus-DP循环输入电报中的变量。此外,对于需要访问许多HART变量的应用可以使用HART“邮箱”。该技术收集HART变量根据需要;节省电报中的空间数据工作过度。此方法仅在使用时可用参数化。
该地址空间定义为支持PCI总线硬件配置(请参阅PCI总线规范以获取有关配置地址空间)。PCI总线目标需要实现基址配置地址空间中的寄存器,用于访问内部寄存器或函数。这个BIOS使用基址寄存器来确定设备需要多少空间然后设备将驻留在该空间中的位置。此功能允许PCI设备位于内存或输入/输出地址中空间VMIVME-7698 BIOS根据将IRQx线路映射到适当的设备标准ISA架构。该初始化操作无法更改;但是,自定义应用程序可以重新路由BIOS完成初始配置周期后中断配置。
4个动态信号的信号接口卡输入和2个转速表(速度)的输入,为MPC4机械防护卡螺钉端子连接器(48个端子)输入/输出连接包含4个可归属的继电器报警信号,由软件控制32个完全可编程的开路集电极输出(跳线可选)到IRC4和RLC16继电器卡片缓冲“原始”传感器信号和模拟输出振动信号(电压或电流)渠道所有输入和输出的EMI保护实时插卡和拔卡(热插拔)可提供“标准”和“立电路”版本 转换器的程序控制由基本握手序列组成。稳定延迟直接发生在模拟网络(例如选择新的输入信道),并表示网络的稳定时间。结算延迟完成后跟踪保持(T&H)放大器进入跟踪模式跟踪间隔开始。通过支持云的功能增强了其 的 RobotStudio® 机器人编程和仿真软件。新的 RobotStudio Cloud 使个人和团队能够在世界任何地方、使用任何设备就机器人单元设计进行实时协作。自动版本控制新功能提高了团队间的透明度和生产力。该软件简化的界面和直观的导航使所有技能水平的用户都能从事机器人项目。
当系统 要处理大量数据或需要更灵活的用户界面使用16位、32位或64位处理器。一个8- or16位可以选择处理器而不是32位处理器片上系统或微控制器应用低功率电子设备或者是的一部分混合信号集成电路具有噪声敏感型片内模拟电子学例如高分辨率模数转换器或两者。有些人说,在8位芯片上运行32位算法可能会消耗更多的功率,因为芯片用多条指令执行软件。然而,也有人说,在运行同等软件例程时,现代8位芯片总是比32位芯片更省电。
在用户程序执行阶段,PLC总是按由 上而下的顺序依次地扫描用户程序(梯形图)。在扫描每一条梯形图时, 又总是先扫描梯形图左边的由各触点构成的控制线路,并按先左后右、先上后下的顺序对由触点构成的控制线路进行逻辑运算,然后根据逻辑运算的结果,刷新该逻辑线圈在系统RAM存储区中对应位的状态;或者刷新该输出线圈在I/O映象区中对应位的状态;或者确定是否要执行该梯形图所规定的特殊功能指令。即,在用户程序执行过程中,只有输入点在I/O映象区内的状态和数据不会发生变化,而其他输出点和软设备在I/O映象区或系统RA存储区内的状态和数据都有可能发生变化,而且排在上面的梯形图,其程序执行结果会对排在下面的凡是用到这些线圈或数据的梯形图起作用;相反,排在下面的梯形图,其被刷新的逻辑线圈的状态或数据只能到下一个扫描周期才能对排在其上面的程序起作用。